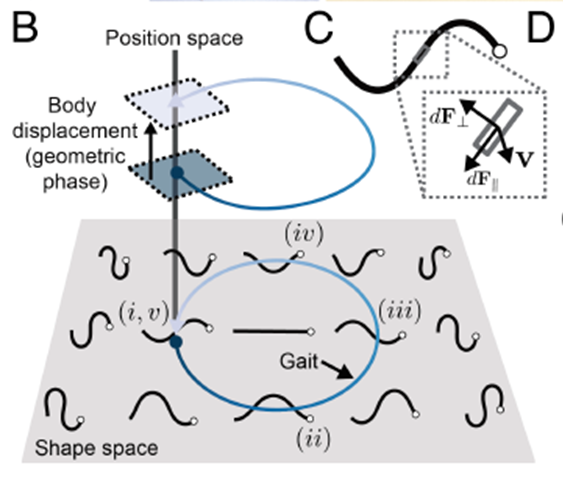
Geometric phase predicts locomotion performance in undulating living systems across scales, Jennifer M. Rieser, Baxi Chong, Chaohui Gong, Henry C. Astley, Perrin E. Schiebel, Kelimar Diaz, Christopher J. Pierce, Hang Lu, Ross L. Hatton, Howie Choset, and Daniel I. Goldman, Proceedings of the National Academy of Sciences (PNAS) (2024), Vol. 121, No. 24, e2320517121
Mechanical intelligence simplifies control in terrestrial limbless locomotion,Tianyu Wang, Christopher Pierce, Velin Kojouharov, Baxi Chong, Kelimar Diaz, Hang Lu, and Daniel I Goldman, Science Robotics (2023), eadi2243
Self-propulsion via slipping: Frictional swimming in multilegged locomotors, Baxi Chong, Juntao He, Shengkai Li, Eva Erickson, Kelimar Diaz, Tianyu Wang, Daniel Soto, and Daniel I. Goldman, Proceedings of the National Academy of Sciences (PNAS) (2023)
Active and passive mechanics for rugose terrain traversal in centipedes, Kelimar Diaz, Eva Erickson, Baxi Chong, Daniel Soto, and Daniel I. Goldman, Journal of Experimental Biology (JEB) (2023),Volume 226, No. 4, jeb244688
A general locomotion control framework for multi-legged locomotors, Baxi Chong, Yasemin O. Aydin, Jennifer M. Rieser, Guillaume Sartoretti, Tianyu Wang, Julian Whitman, Abdul Kaba, Enes Aydin, Ciera McFarland, Kelimar Diaz, Jeffery W. Rankin , Krijn B. Michel, Alfredo Nicieza, John R. Hutchinson, Howie Choset, and Daniel I. Goldman, Bioinspiration and Biomimetics (2022), Vol. 17, 046015
Enhancing Legged Robot Navigation of Rough Terrain via Tail Tapping, Daniel Soto, Kelimar Diaz, and Daniel I. Goldman, Climbing and Walking Robots Conference (2021), pages 213-225
A minimal robophysical model of quadriflagellate self-propulsion, Kelimar Diaz, Tommie L. Robinson, Yasemin Ozkan-Aydin, Enes Aydin, Daniel I. Goldman and Kirsty Y. Wan, Bioinspiration and Biomimetics (2021), Volume 16, Number 6, 066001
The Omega Turn: A Biologically-Inspired Turning Strategy for Elongated Limbless Robots, Tianyu Wang, Baxi Chong, Kelimar Diaz, Julian Whitman, Hang Lu, Matthew Travers, Daniel I. Goldman, Howie Choset, 2020 International Conference on Intelligent Robots and Systems (IROS), pages 7766-7771
Robophysical modeling of bilaterally activated and soft limbless locomotors, Perrin E. Schiebel, Marine C. Maisonneuve, Kelimar Diaz, Jennifer M. Rieser, and Daniel I. Goldman, Living Machines (2020), pages 300-311
Mitigating memory effects during undulatory locomotion on hysteretic materials, Perrin E. Schiebel, Henry C. Astley, Jennifer M. Rieser, Shashank Agarwal, Christian Hubicki, Alex M. Hubbard, Kelimar Diaz, Joseph R. Mendelson III, Ken Kamrin, Daniel I. Goldman, eLife Sciences (2020), Volume 9, e51412